“禾斗”泛生活化通用机器人
廖伟华 2020-09-01 22:30:47

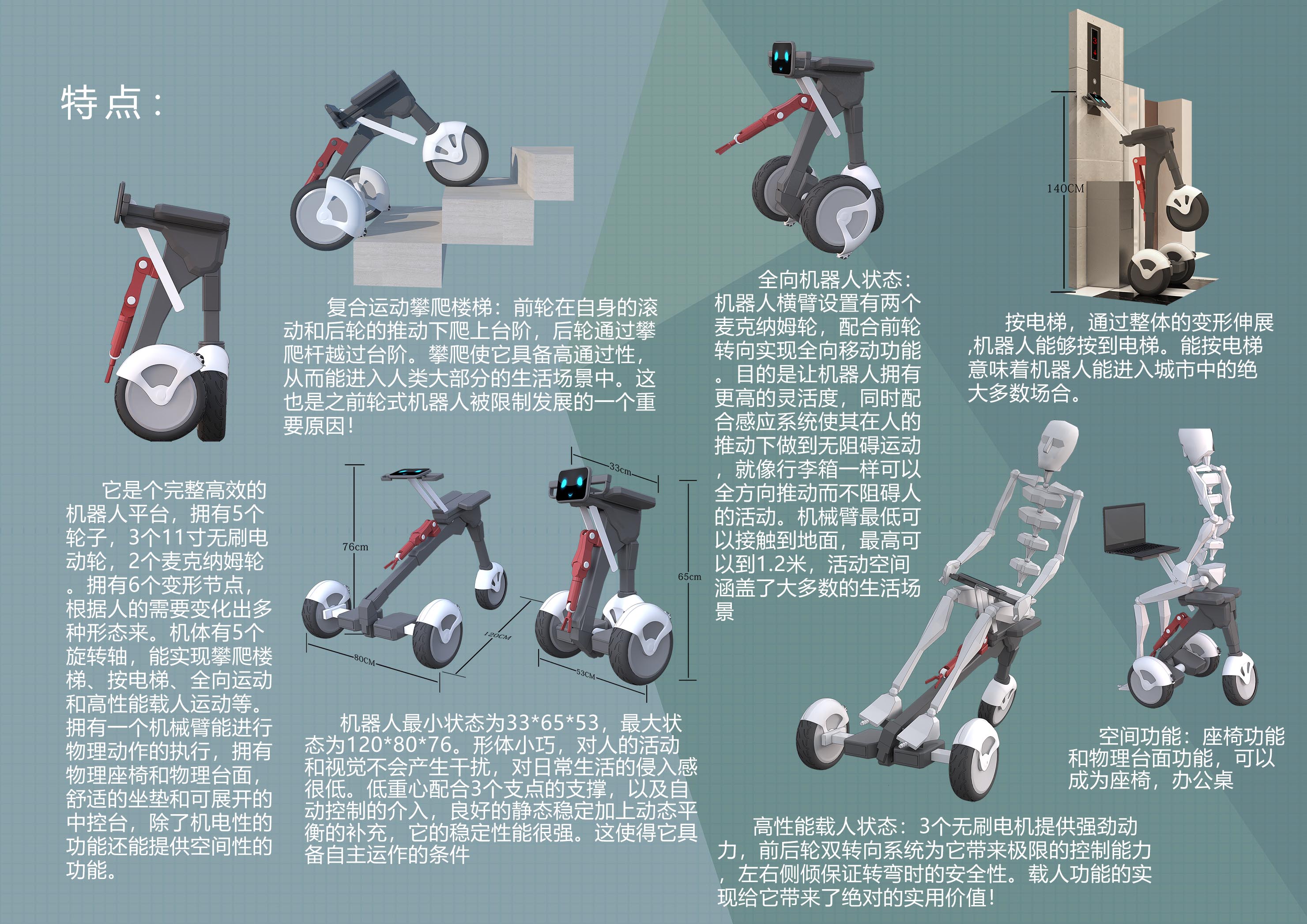
“禾斗”通用机器人属于一个可编程机械体,是一个处于轮式和足式中间状态的机器人,它能完全发挥轮式机器人的高效性,又能充分发挥足式机器人的泛场景性。它由计算部件(大脑)、可变形机体(躯干)、运动部件(足)、执行部件(手)、传感器(眼睛耳朵等)组成,是一个结构完整功能齐全的机器人。
它的机体有12个自由度,由前臂、后臂、横臂、折叠臂、坐臂、扶臂、3轴旋转部件、5个轮子等组成。它拥有6个变形节点,可以根据人的需要变化出多种形态来。机体有5个旋转轴和一对攀爬杆,能实现:攀爬楼梯、全向移动、高性能载人、平台自适应稳定。设置有一个机械臂,使它能进行物理动作的执行。还有舒适的坐垫和可展开的中控台面,除了机电性的功能外还能提供空间性的功能。



联系我们
© Copyright Zhiwei Robotics Corp. All Rights Reserved
 上海创客嘉年华
上海创客嘉年华